Komodo.Core.ECS.Components.DynamicBodyComponent Class Reference
Class defining dynamic bodies. More...
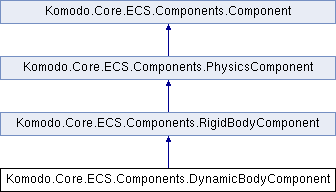
Inheritance diagram for Komodo.Core.ECS.Components.DynamicBodyComponent:
Public Member Functions | |
| DynamicBodyComponent (IPhysicsShape shape) | |
| void | ApplyForce (Vector3 force) |
| Applies a force vector to the body with no regard for the point of application. More... | |
| void | ApplyForceAtPoint (Vector3 force, Vector3 pointOfApplication) |
| Applies a force vector to the body with regard for the point of application. More... | |
| void | ClearVelocities () |
| Clears all current velocities. More... | |
| override void | Initialize () |
| Initializes a DynamicBodyComponent. More... | |
 Public Member Functions inherited from Komodo.Core.ECS.Components.RigidBodyComponent Public Member Functions inherited from Komodo.Core.ECS.Components.RigidBodyComponent | |
| override void | Initialize () |
| Initializes a RigidBodyComponent. More... | |
Detailed Description
Class defining dynamic bodies.
Member Function Documentation
◆ ApplyForce()
| void Komodo.Core.ECS.Components.DynamicBodyComponent.ApplyForce | ( | Vector3 | force | ) |
Applies a force vector to the body with no regard for the point of application.
◆ ApplyForceAtPoint()
| void Komodo.Core.ECS.Components.DynamicBodyComponent.ApplyForceAtPoint | ( | Vector3 | force, |
| Vector3 | pointOfApplication | ||
| ) |
Applies a force vector to the body with regard for the point of application.
◆ ClearVelocities()
| void Komodo.Core.ECS.Components.DynamicBodyComponent.ClearVelocities | ( | ) |
Clears all current velocities.
◆ Initialize()
|
virtual |
Initializes a DynamicBodyComponent.
Reimplemented from Komodo.Core.ECS.Components.PhysicsComponent.
